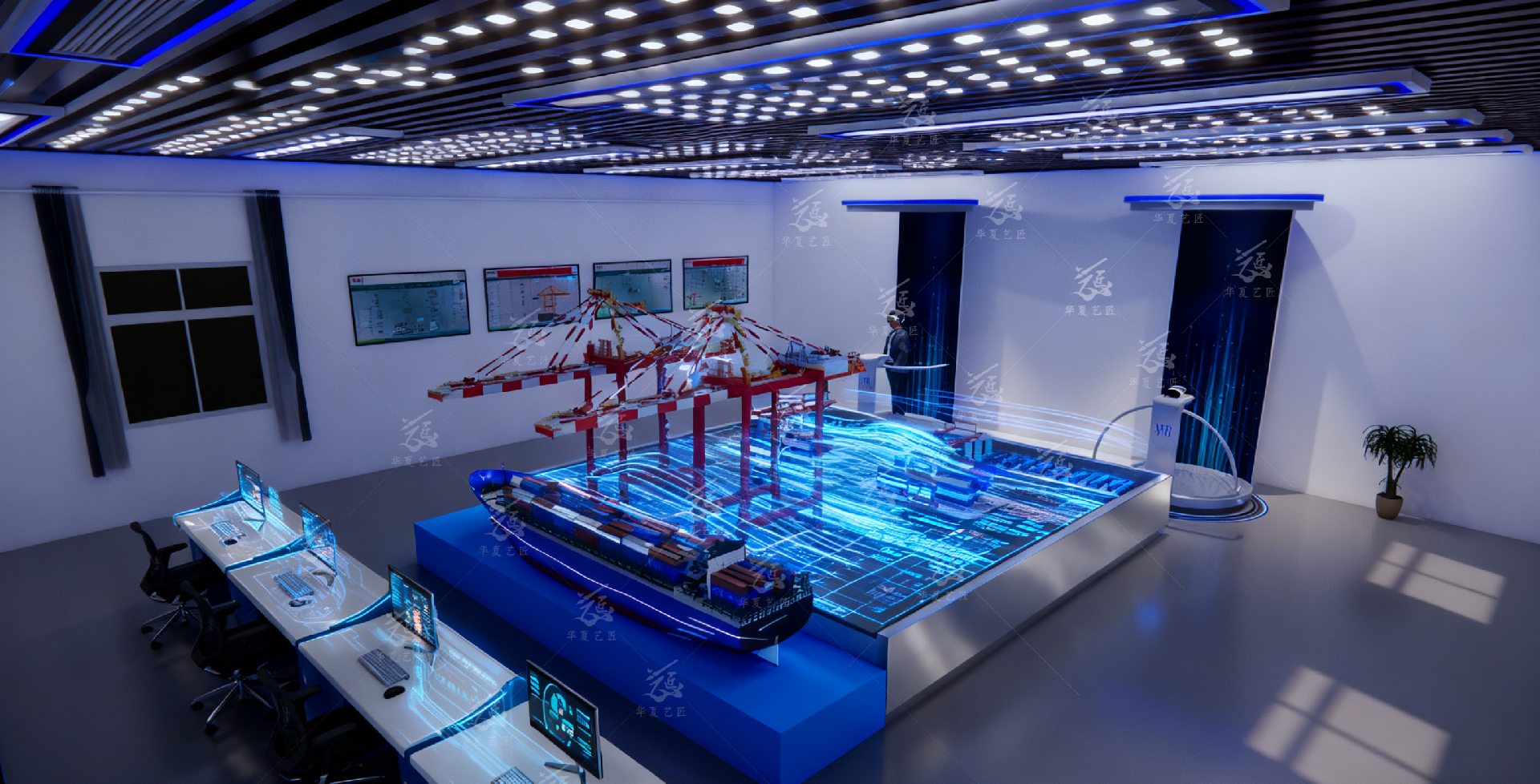
多式联运教学仿真实训室平台
一、项目概述:
搭建一套自动化集装箱多式联运码头动态实体仿真模型,展示港口物流整体流程,主要包含船舶动态到离港、码头内部装卸作业、集装箱海铁联运、(内陆集疏
运)等环节,并通过无线通信、传感器、RFID、红外识别、图像识别、PLC控制等技术对系统中所有实体模型进行智能调度与自动化控制。
二、主要场景:
(1) 自动化集装箱码头内部主要场景(泊位、AGV车道、堆场及箱区、(厂区大门))
(2) 多港口及港口之间航道场景(只需展示其中一个港口的码头内部场景、航道只需进行示意,可根据总体场景的布置搭建环形结构的船舶航行通道)
(3) 海铁联运列车装卸场景(列车装卸线、海铁联运集装箱堆存箱区)(设置在码头堆场后方区域)
三、实体模型:
(1)船舶:COSCO
(2)集装箱:20ft、40ft
(3)岸边装卸机械:普通岸桥、双小车岸桥、双吊具岸桥
(4)堆场装卸机械:轨道吊、(轮胎吊)
(5)水平运输机械:AGV、(ALV、无人集卡、AGV伴侣)
(6)铁路班列、轨道
(7)海铁联运堆存箱区装卸机械:轨道吊(实现海铁联运集装箱交接)
(8)(厂区大门闸口)
四、实现功能:
(1)AGV:根据指令,自动执行运输任务。AGV沿所铺设的AGV车道行驶,可设定不同的AGV运行速度。AGV上配置传感器与智能控制系统,运输过程中具备自主避碰、
路径规划等功能。
(2)岸桥:涉及多类型的岸桥,按照不同类型岸桥的实际作业方式与运动结构进行还原。岸桥顶部配置传感器、摄像头等设备,能实现集装箱的精准定位、扫描、识
别与监测,可根据指令,自动执行集装箱装卸任务(包含集装箱翻倒箱操作)。可对岸桥每一个作业环节(例如大车行驶、小车行驶、吊具升降)的运行速度进行设置。
(3)场桥:场桥顶部配置传感器、摄像头等设备,能实现集装箱与堆场箱位的精准定位、扫描、识别与监测,可根据指令,自动执行提箱与存箱任务(包含集装箱翻
倒箱操作)。可对场桥每一个作业环节(例如大车行驶、小车行驶、吊具升降)的运行速度进行设置。设计一个堆场箱区配置两个场桥的场景,当两个场桥作业路径
发生冲突时,具备自主避让的功能。
(4)集装箱:集装箱分20ft标箱,和40ft箱子。集装箱上具有不同的识别码,可以配合岸桥、场桥的扫描、识别功能。
(5)船舶:拟订制新能源船舶模型,利用钒液流电池将化学能转换为电能实现船舶的电力驱动。船舶可根据指令沿铺设的航道行驶,并实现多港口挂靠。
(6)班列:根据指令沿着所铺设的轨道完成班列到港动作,并停靠在预先规划好的位置上。在完成装载任务后,执行班列离港动作。
(7)海铁联运轨道吊:根据指令行驶到指定位置,按顺序定位到相应的集装箱执行抓取与装箱操作,完成班列的集装箱装载任务。
(厂区大门闸口:识别来车自动抬杆落杆。)
五、技术要求:
(1)所有模型均为智能设备,预留运动机构控制接口,可实现与PLC连锁,进行编程控制。以智能设备为控制对象,集合无线通信技术、传感器技术、RFID、自动循
迹技术、红外识别技术(自动避让)、嵌入式系统技术、PLC计算控制技术以及图像处理等技术实现智能调度与自动化控制。
(2)AGV续航可达8小时,满足运行、测试与展示要求。
(3)岸桥、场桥抓取集装箱的位置误差不超过2mm。
六、西门子PLC电控系统
PLC主要用于接收沙盘中无线设备的反馈信号,和不同控制芯片组合使用,实现不同沙盘控制要求。同时具有网关功能。实现动态暂停、运行传送信号仿真动态模拟。
主控器负责实时接受各个车辆,管道流动状态信息。 并且通过预设的控制逻辑顺序。
实现船体控制、岸桥、场桥、AGV、集卡车、铁路运输 整个物流海运运输解决方案 基于此流程,控制层使用高端PLC、通讯模块、数字量输入模块、接口模块、断路器、自动化系统,高复杂性和高系统性能要求的工厂最佳选择,可完美适用于设备与工厂工程组态中的各种控制应用。而且组态可扩展,用户可根据当地条件对 PLC 现场进行调整。通过工业级现场总线Profinet扩展各系统子环节,进而向下发送指令,各子系统环节按照总控PLC的命令指令执行相关功能;在与控制层的上位层或订单、调度等层面的数据沟通中,可使用以太网或R串行总线等方式实现数据互通,以太网主要采用TCP、UDP、OPC等协议连通;串行总线主要采用RS232或RS485等协议实现。PLC对上接收订单等相关信息,对下发布各子系统的控制命令,并接收相应的反馈,最后将产品信息推送给销售、售后等环节。在整个控制层的环节中,通过可视化的WINCC组态来反馈所有相关的信息,采用组态软甲监控整个工艺流程,功能强大,灵活性好,可靠性高。