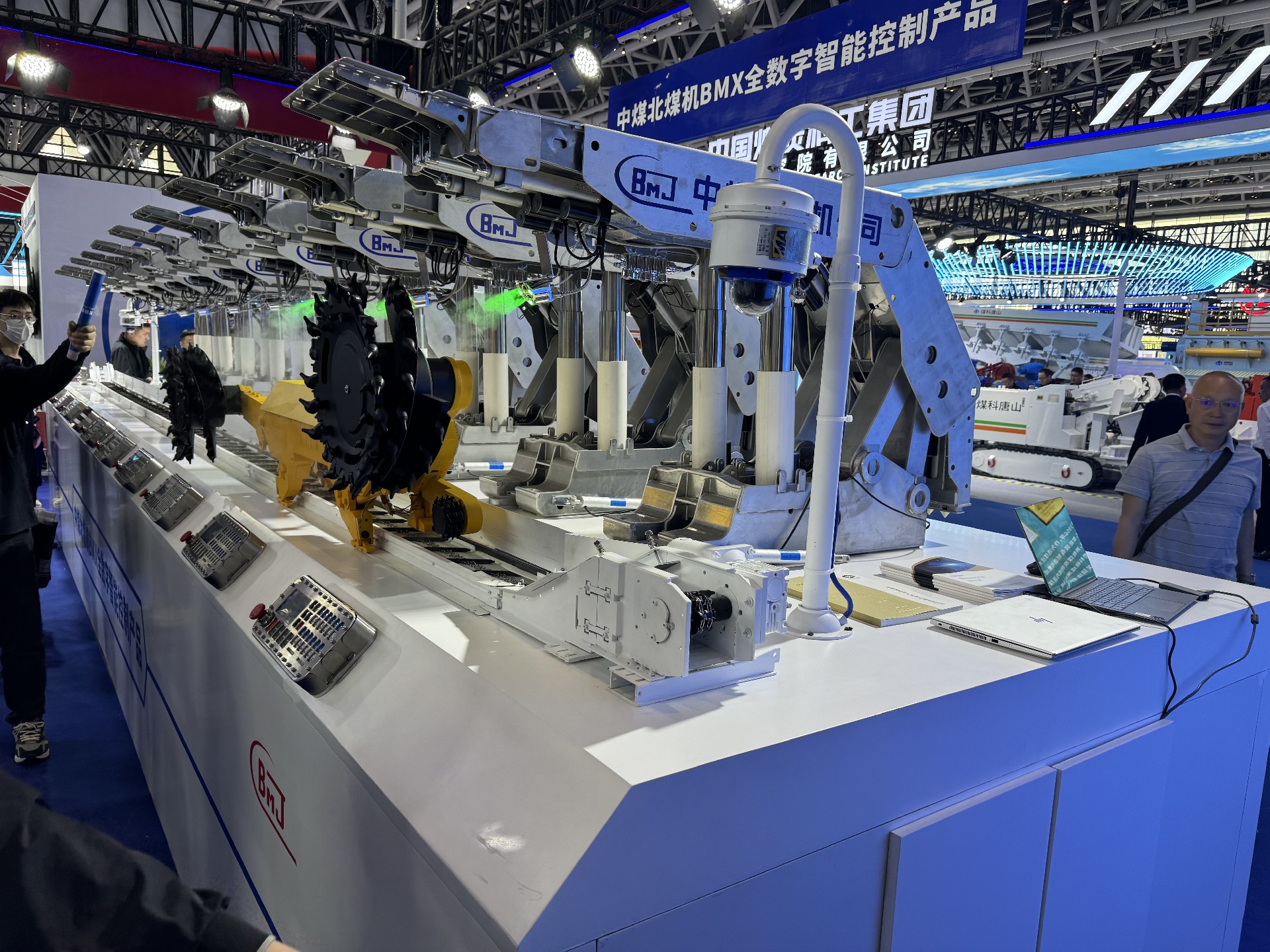
结构主体:采用 Q345B 高强度钢(屈服强度≥345MPa),经调质处理(硬度 HRC28-32),关键部件如履带架、截割臂采用激光切割(精度 ±0.2mm)与焊接成型,焊缝高度≥3mm,超声波探伤合格率 100%。
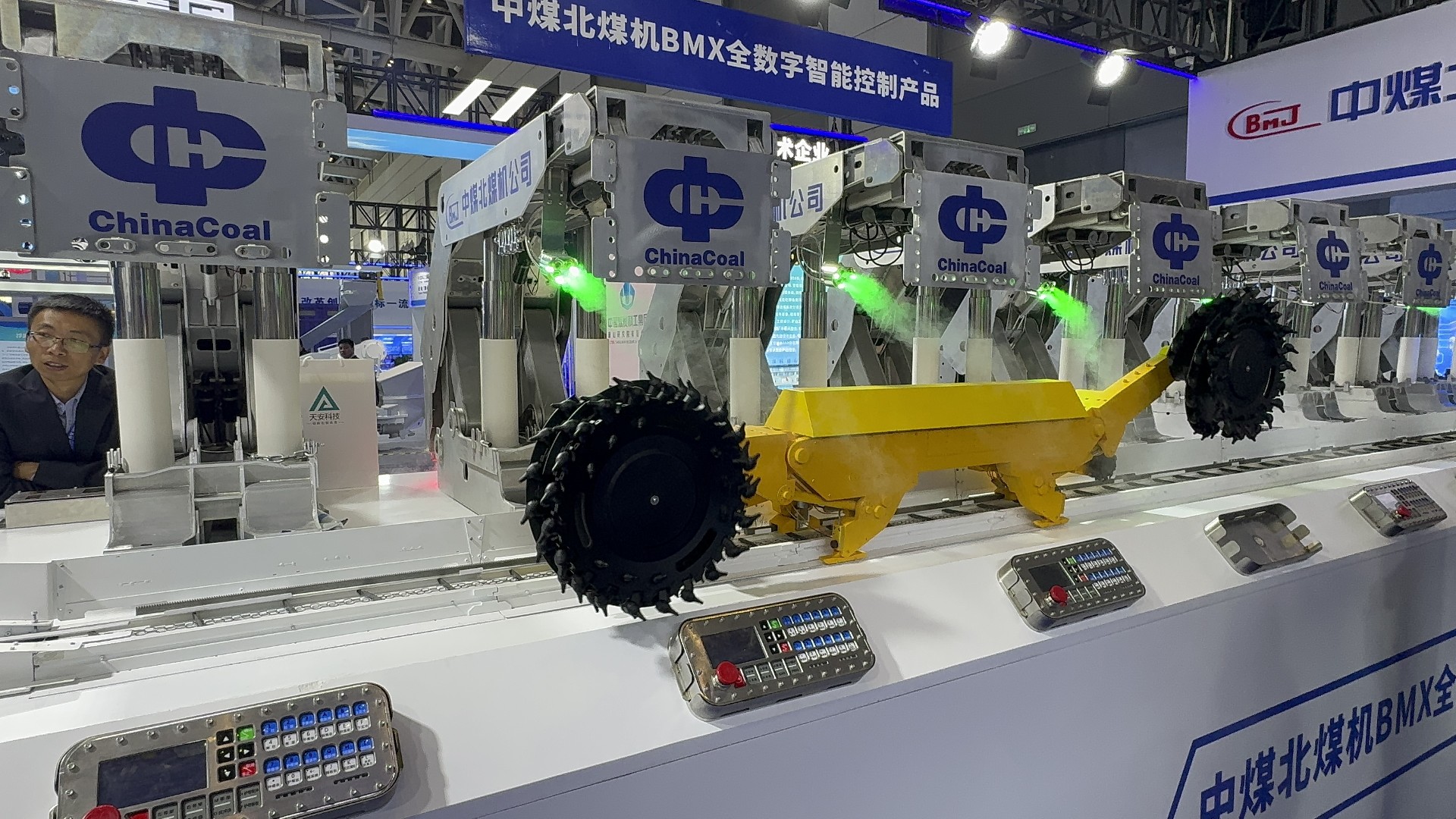
耐磨部件:截齿、刮板等采用耐磨铸铁(硬度 HRC50-55),表面镀铬(厚度 0.02-0.05mm),摩擦系数≤0.1,模拟真实工况下的抗磨损能力。
轻量化设计:非承载部件可选用铝合金(如 6061-T6,抗拉强度≥310MPa)或碳纤维复合材料(密度≤1.8g/cm³,模量≥230GPa),在保证强度的同时减轻重量。