1. 模型核心组成与设备解析
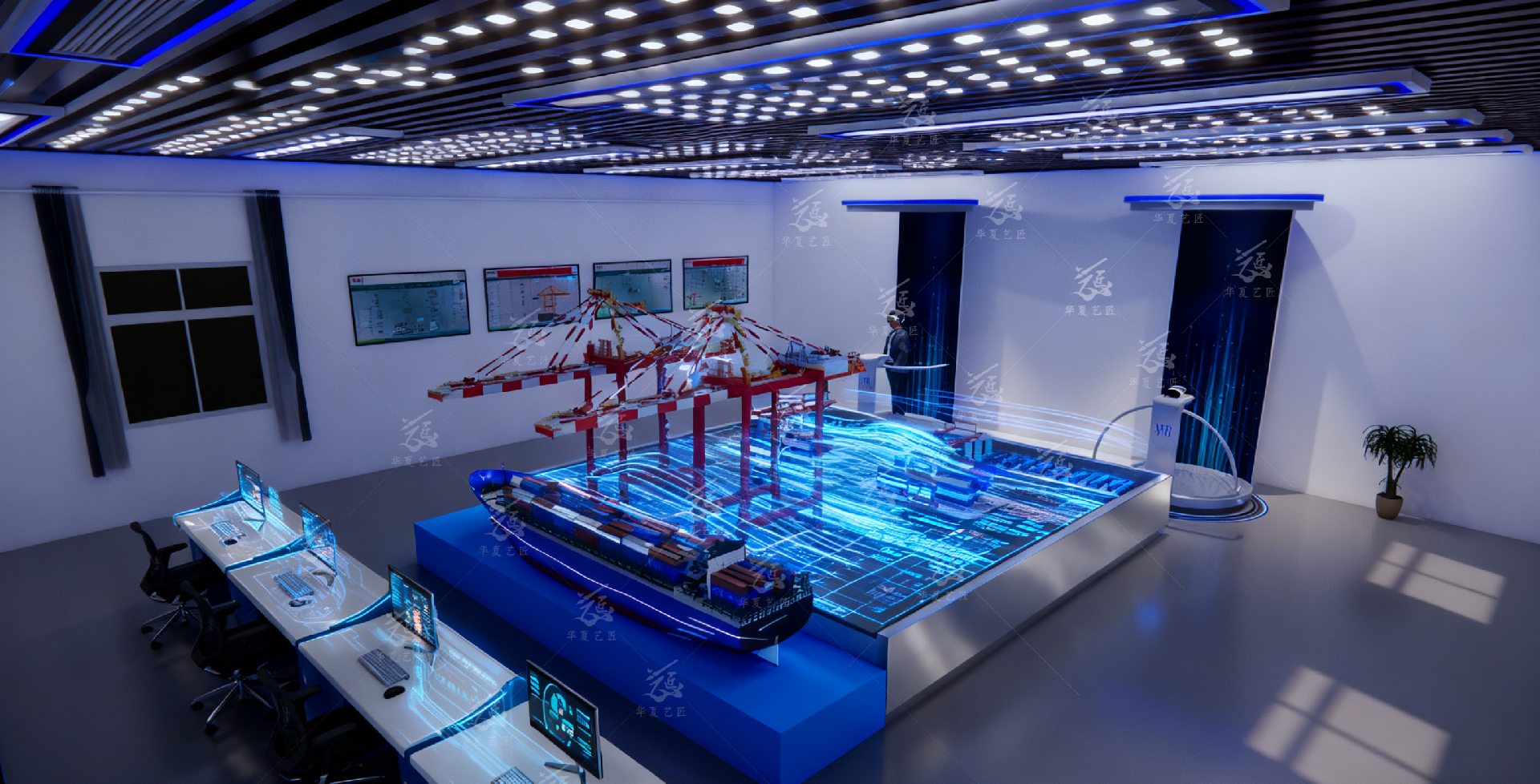
模型包含多个核心模块,完整还原了集装箱码头的关键设施与作业场景:
岸桥系统:包含 4 台标注 “DLMU STS01~04” 的岸边集装箱起重机模型,还原了真实岸桥的机械结构,支持大车沿轨道移动、小车水平行走、吊具升降及集装箱抓取动作,吊具抓取误差控制在 2 毫米以内,可精准模拟船舶与堆场间的集装箱装卸作业。
船舶泊位:设置了 2 艘大型集装箱船模型,还原了超大型集装箱船的船体、上层建筑与集装箱甲板布局,可模拟船舶靠泊、系泊及装卸作业的完整场景。
集装箱堆场:配备了带有 COSCO 等品牌标识的彩色标准集装箱模型,还原了不同箱型与行业通用的颜色标识,同时设置了自动化堆场区域,可模拟堆场分区、堆存规则与场桥作业流程。
水平运输系统:包含无人集卡 / AGV 模型与港区道路场景,可模拟集装箱从岸桥到堆场、堆场到闸口的水平运输过程,支持路径规划、自动避障与任务调度的演示。
港区配套设施:还原了码头岸线、道路标线、辅助建筑,并配备了灯光系统,通过灯光与基础场景的配合,模拟港区真实作业环境,增强场景的真实感与沉浸度。

2. 核心功能与动态演示流程
模型支持完整的集装箱码头作业流程动态模拟,核心环节依次为:
船舶到港与靠泊:船舶模型进入泊位,岸桥启动对位,模拟靠泊准备作业流程。
岸桥装卸作业:岸桥吊具抓取船上集装箱,通过小车移动、大车平移,将集装箱转运至水平运输设备;反向流程则可模拟出口集装箱的装船作业。
水平运输调度:无人集卡 / AGV 接收调度指令,沿预设路径将集装箱运送至指定堆场位置,同时可模拟港区内的拥堵避让与路径优化场景。
堆场堆存与管理:场桥(部分配置版本包含)对集装箱进行堆垛作业,模拟堆场分区管理与箱位调度的核心逻辑。
离港与流程闭环:出口集装箱完成装船后,船舶模型驶离泊位,完成一次完整的港口作业循环演示。

3. 应用场景与价值
教学实训场景:主要服务于港口物流、交通运输等专业的教学工作,让学生直观理解集装箱码头的设备布局、作业流程与调度逻辑,替代高成本、高风险的实地实训环节。
科研验证场景:可用于港口作业调度算法、自动化设备协同、5G 智慧港口相关技术的模拟测试,为真实港口的智能化改造提供实验支撑与数据参考。
科普展示场景:通过动态演示向公众普及港口物流知识,展现集装箱运输在全球贸易中的枢纽作用,以及自动化、智能化技术对港口作业效率的提升效果。
4. 模型技术亮点
高精度动态控制:采用 PLC 编程控制技术,实现岸桥、集卡等设备的精准动作模拟,吊具抓取稳定可靠,避免了传统模型易出现的掉箱、偏移问题。
场景化交互设计:部分版本支持触控或按键式操作,可手动下发装卸任务、调整作业节拍,模拟港口调度员的真实工作场景,增强参与感。
真实数据还原:基于大连港、洋山港等真实自动化码头的布局数据建模,设备比例、作业流程、箱位规则均与现实场景保持一致,具备较高的参考价值。