
多式联运动态仿真模型制作需围绕 “多运输方式协同联动” 核心,遵循 “需求定义→系统设计→分模块制作→集成调试→验证优化” 流程,重点解决不同运输子系统(铁路、公路、港口 / 机场、仓储)的动态衔接与数据同步问题。
此阶段需明确仿真目标与系统边界,为后续制作提供方向,是确保模型贴合实际应用的基础。
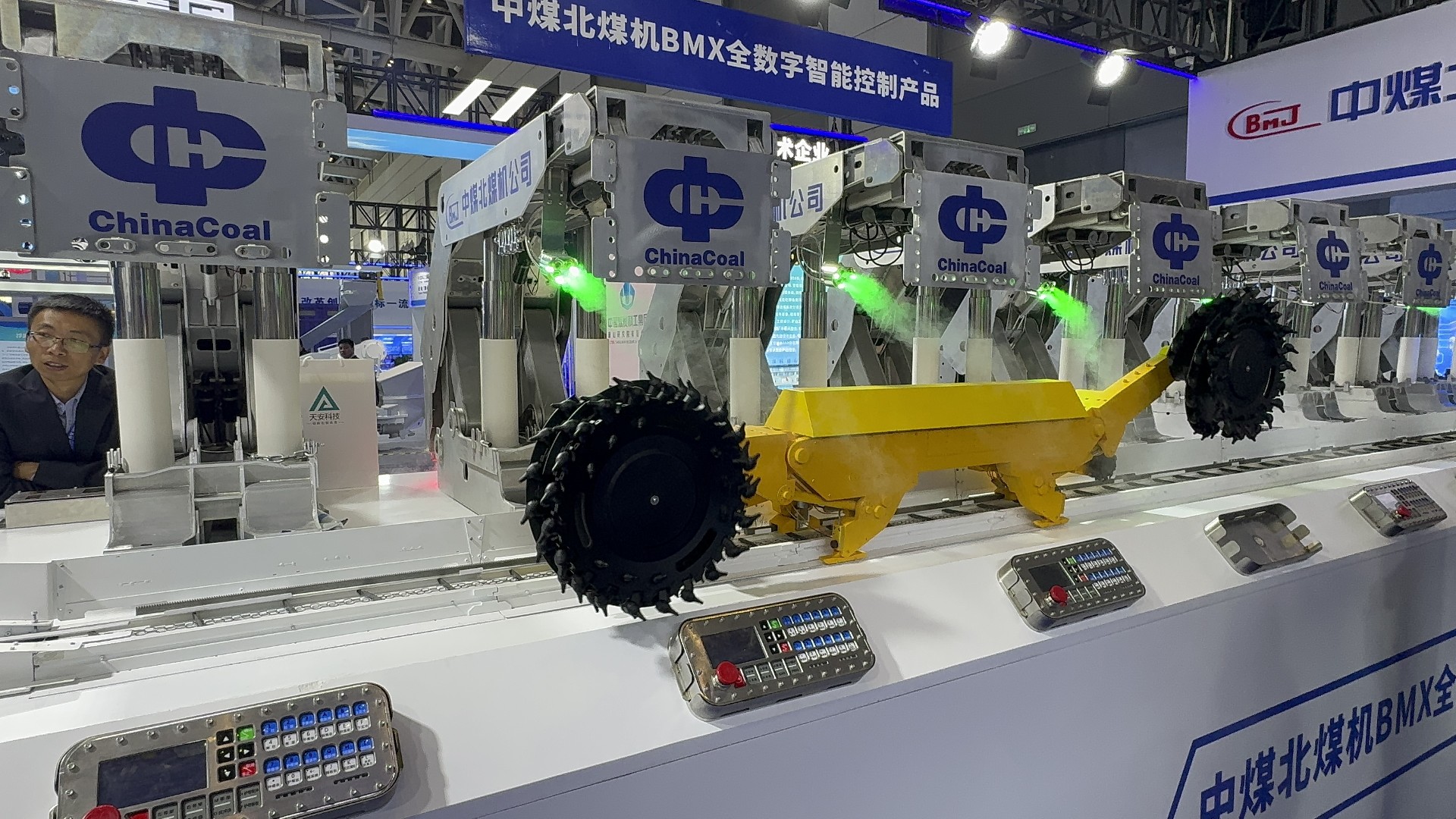
多式联运模型由多个独立运输子系统构成,需按 “分模块制作、标准化接口” 原则,确保后续可集成联动。
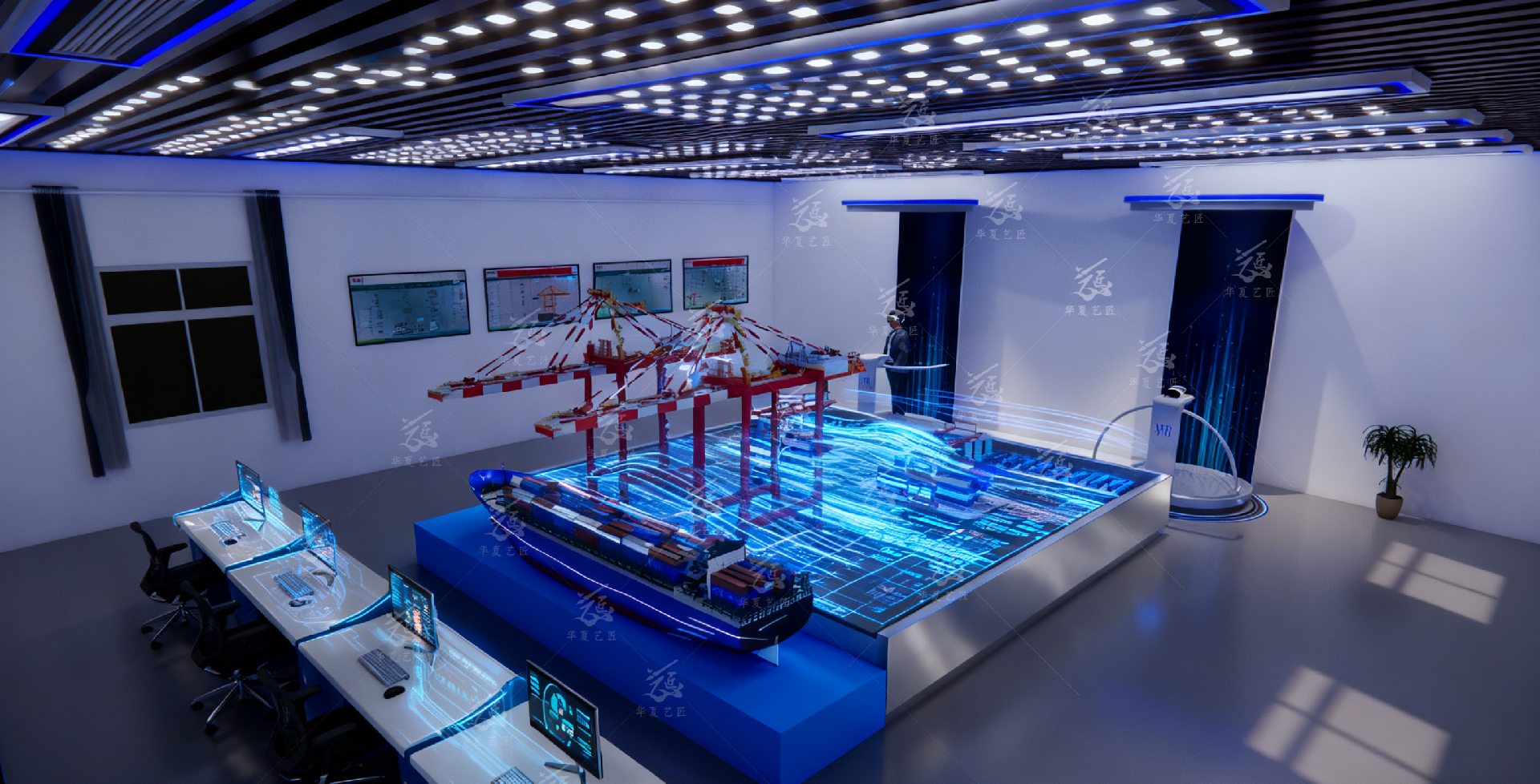
此阶段是将各子系统 “串联” 为整体,核心是解决设备动作协同与数据交互,实现多式联运的 “动态仿真”。
通过细节优化提升模型真实感,同时确保耐用性,适配长期教学或展示需求。
通过多轮测试确保模型动态性能稳定,满足设计目标。